行业概述
工业机器人广泛应用于搬运、焊接、喷涂、装配、检测等场景。机器人关节模组对减速机的轻量化、高刚性、低背隙要求严苛——既要减轻机械臂自重以提升负载比,又要保证末端定位精度。江捷精密减速机的高扭矩密度设计,可在紧凑体积内输出大扭矩,适配协作机器人与SCARA机器人关节空间。
典型应用场景
01
关节模组减速机
六轴机器人的各旋转关节需要减速机提供大减速比与高刚性。JDXR系列直角减速机的紧凑结构可在关节有限空间内实现电机横向布置,减速比范围3-100,输出扭矩覆盖10-500Nm,适配各负载等级机器人关节。
02
末端执行器旋转
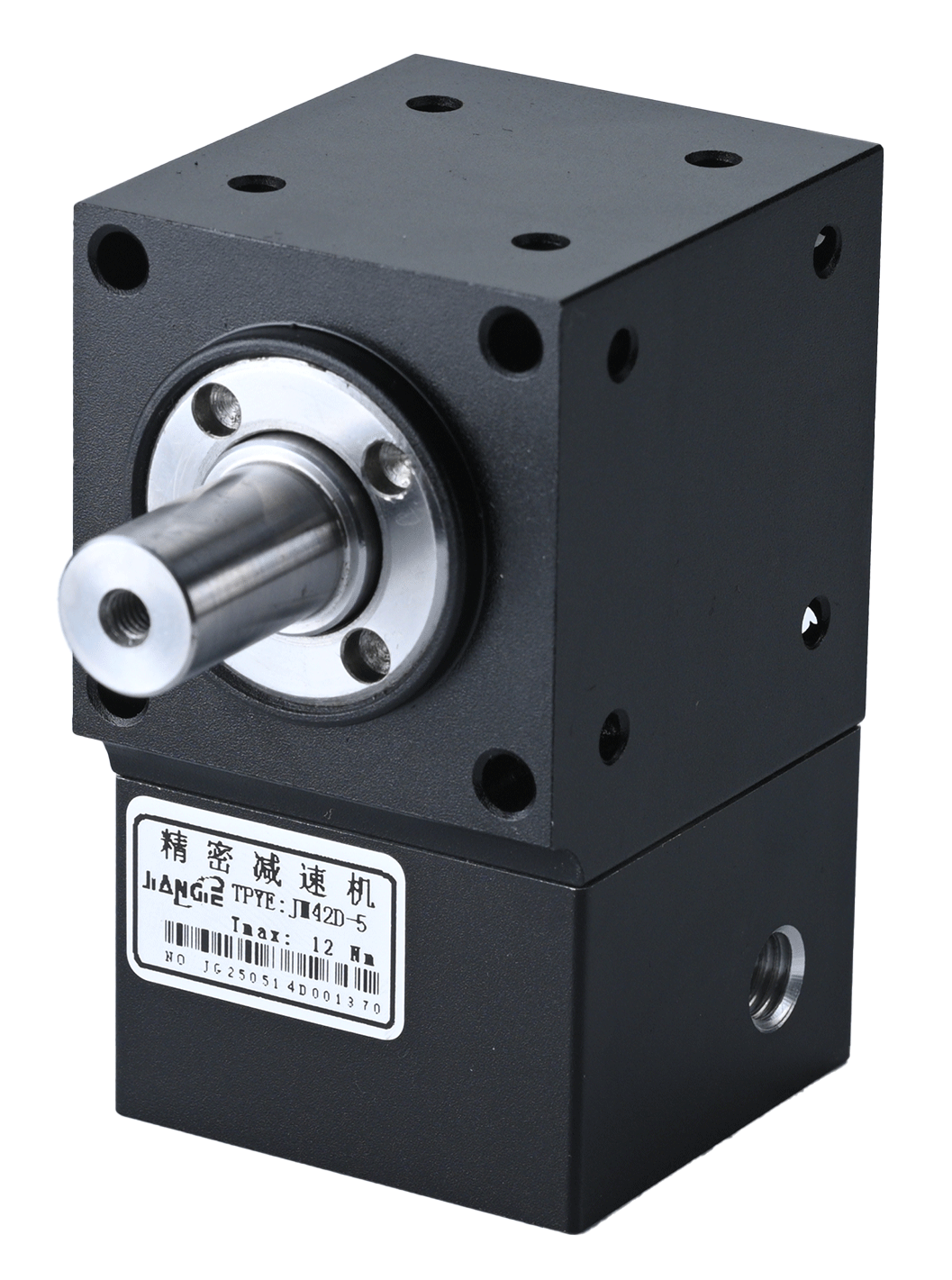
机器人末端夹爪、吸盘等执行器需要旋转调整抓取角度。采用JM系列精密换向器可在狭小空间内实现90度转向传动,静音设计保证机器人工作噪音低于70dB,适合人机协作场景。
03
AGV/AMR轮驱转向
AGV驱动轮与转向机构需要减速机具备高扭矩重量比。采用JD系列斜齿减速机搭配轮毂电机,减速机重量仅1.5kg即可输出50Nm以上扭矩,助力AGV实现高负载搬运与灵活转向。
04
SCARA机器人Z轴
SCARA机器人的Z轴升降与R轴旋转需要高精度定位。采用JG系列行星减速机搭配步进或伺服电机,实现Z轴±0.02mm重复定位精度与R轴1弧分以内的旋转精度。
行业痛点与解决方案
轻量化与高扭矩平衡
机器人负载比(负载/自重)是关键指标。江捷JDXR系列采用铝合金外壳与高强度合金钢齿轮组合,整机重量较传统铸铁减速机减轻40%,同时保持同等扭矩输出,有效提升机器人负载比。
多轴同步精度
多关节机器人要求各轴运动严格同步。江捷减速机出厂前进行背隙配对检测,同批次产品背隙偏差控制在0.5弧分以内,确保多轴联动时轨迹一致性。
抗冲击与过载能力
机器人急停或碰撞时会产生数倍额定扭矩的冲击。江捷减速机齿轮采用渗碳淬火工艺,齿面硬度HRC58-62,芯部保持韧性,可承受瞬时3倍额定扭矩的冲击载荷。